DIN rail rulez

Das ist der Raspberry mit opto - entkoppeltem CAN-Bus Adapter, und noch ein bisschen Klappertechnik aus der Restekiste.
Das ist der Raspberry mit opto - entkoppeltem CAN-Bus Adapter, und noch ein bisschen Klappertechnik aus der Restekiste.
Jugend hackt 2014: 12.-14. September 2014, gemeinsam hacken und mit Code die Welt zu verbessern. Glingt ganz vernünftig.
Ein Gast brachte Teile eines Automaten mit in den Space, so ein Snackverkaufsdings mit Drahtspiralen. Die Platinen mit den Motoren für die Spiralen und dem Endschalter, der eine vollständige Spiralenumdrehung detektiert, sind nur zweipolig angeschlossen. Wie geht aber die Auswertung des Schalters, wenn man nur zwei Pole hat?
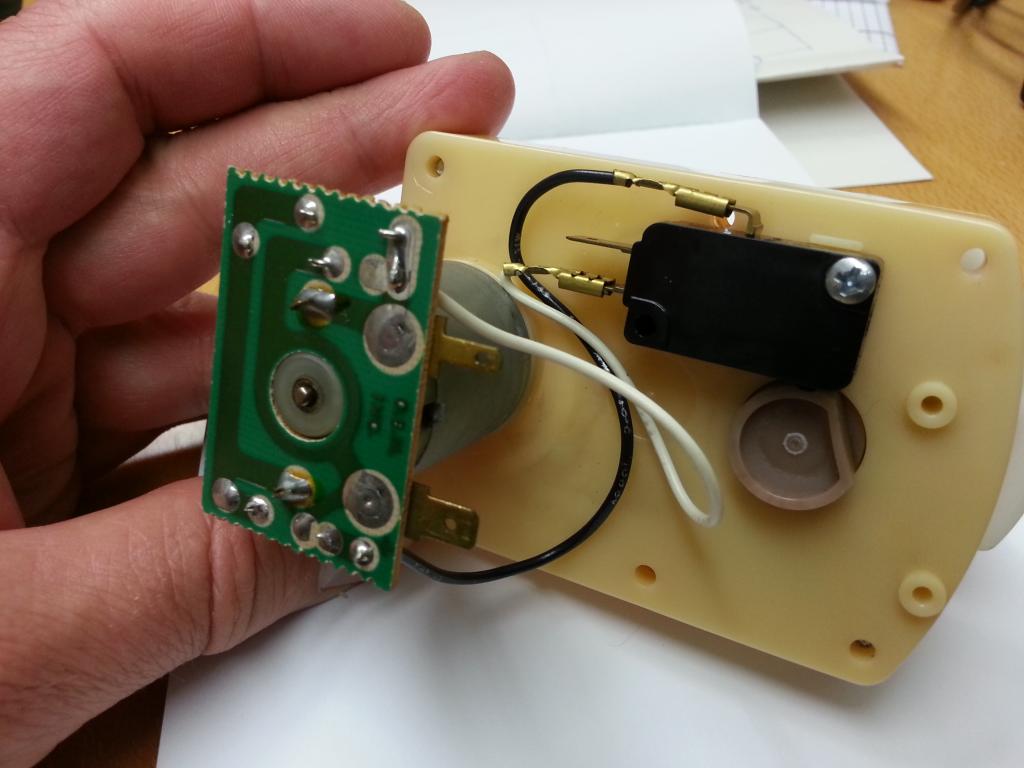

Eine Anfrage im prima Forum von Fingers elektrischer Welt (Ja, das sind DIE!) brachte einen absolut treffsicheren Hinweis auf ein US Patent, mit dem die Stellung des Schalters durch einen dem Motorstrom aufgeprägten Wechselstrom erkannt werden kann.


Planung der Hutschienenbelegung für den Pi im Space, der via CAN diverse Hardware steuern soll. Netzteile für drei Spannungen, China-Relaisplatine und Router. More to come: USV auf 12 V DC Basis.
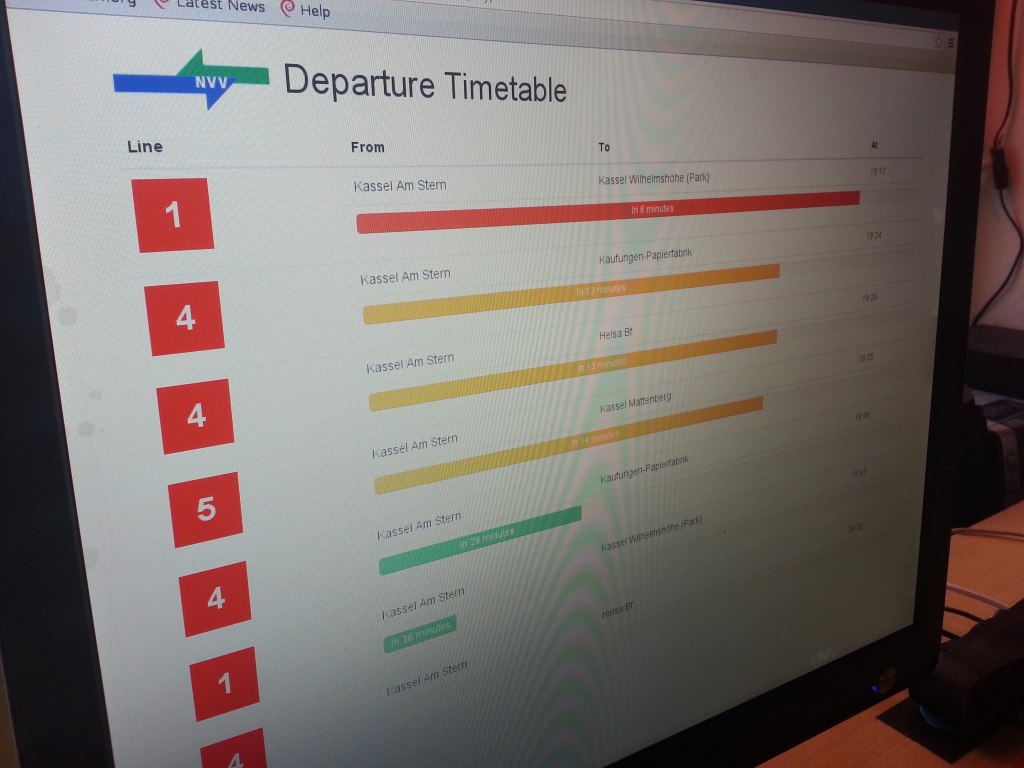
Work in progress: Unser kleiner Touch-Pi hat seine ersten Teilaufgaben in der Space-Steuerung schon bekommen, hier die von der ÖPNV-Website runtergeparsten Abfahrtszeiten der nächsten Bahnen (Die kvg bietet keinerlei vernünftige API an, denn dann könnten die Kunden ja gucken, wann sie die nächste Transportdienstleistung kaufen können - bewahre! Die haben da irgendein proprietäres System [geleast?], wo sie so nette Sachen wie im Bild - sowas hängt dann in offizieller Version im Auebad - jeweils einzeln teuer latzen müssen)
Ausserdem muss ich bei der Gelegenheit mal über deren grauenhafte Site ranten, wo die Fahrplansuche in einem Winz-scroll-dich-tot-Frame läuft! Das ist so 1995!

Wandgehäuse, gelasert, für unseren Pi, der dann Space-Steuerungsaufgaben bekommt.
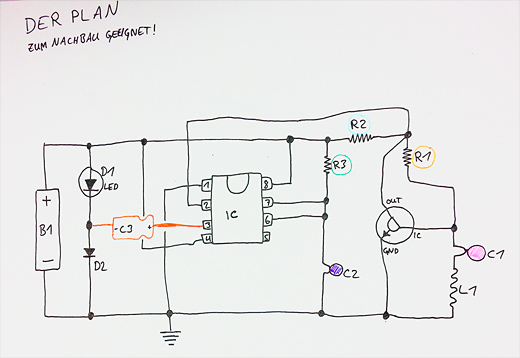
Ich liebe solche Zeichnungen!

Unser RaspberryPi mit Touchscreen ist fast fertig, Touch-Treiber läuft, Auflösung wurde angepasst und Touchscreen kalibriert. Bald wird also alles im Space von unserem Touch-Cockpit aus gesteuert! Cool!

Auf dem Bild sieht man übrigens auf der linken Seite den Raspberry PI, rechts daneben ist der Display-Controller, unter dem HDMI Kabel ist der Touch-Controller versteckt und ganz rechts sind ein paar Knöpfe um den Bildschirm einzustellen (Kontrast und so ;))
{kind=link}
{kind=link}